PWM制御の差異と出力トルク
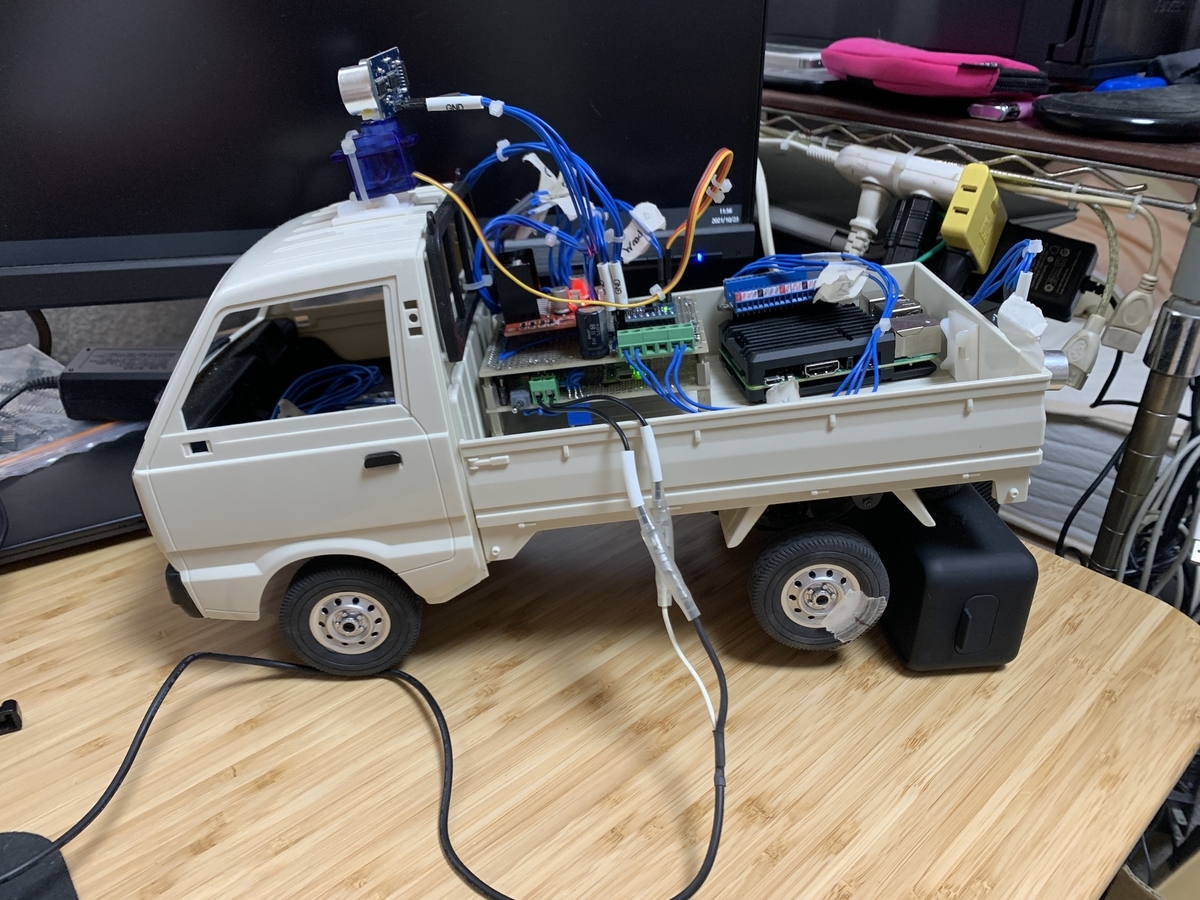
現在作成中の猫を追いかける予定の車ですが、
概ねモーター制御側の雛形は完成してきました。
最終的にバッテリーで長時間駆動させるために、
適切なモーター駆動条件を確認しました。
確認した項目としては、以下の通り。
・PWM駆動周波数
・PWMOFF期間をFastDecay、SlowDecay
・減速側出力のON/OFF
■HブリッジのFastDecayとSlowDecayについて
概要だけ説明します。
FastDecay:PWMOFF期間を電源側へ回生
SlowDecay:ダイオードを介して逆起電力を再利用。
※SlowDecayは回生ブレーキと同位になります。
IndexPro様に分かりやすい解説があるので、紹介します。
尚、L298Nを使用する場合、
SlowDecay:EnablePinをONしたまま、InputPinをPWM制御
FastDecay:InputPinをCWかCCWで固定し、EnablePinをPWM制御
データシート抜粋し以下の通りです。

■試験条件
機材詳細は以下の通り。
但し、以前は各種モータードライバの駆動はフォトカプラを介して駆動していたが
■試験方法
以下写真のように、駆動輪を空転させる形で実施。
・マイコン内で5ms周期でPID制御を実施。
・回転数が規定回転数に到達後、指令値±1rpm時点のPWMのDuty平均値
※回転数、及びDutyは5msサンプリングの50回移動平均値
・駆動電源は、DC12V/1.5Aスイッチング電源
■実験1
PID制御で加速側のみCW方向にPWM出力ON、減速側はDuty0%。
PWMOFF期間をFastDecay、SlowDecay
PWM駆動周波数は50Hz~100kHz

■実験2
実験結果1に付随して
・PID制御の減速側CCW出力有無で比較。
尚、駆動周波数は代表として10kHzで実施。

※CW,CCWの総和より時間平均としてある。
■実験結果まとめ
・基本的にFastDecayを採用するメリットはない。
・スイッチング損失等色々コミコミで考えたときに、SlowDecay運用であれば
PWM駆動周波数1kHz以上は、ほぼ出力トルクは一定と考えられる。
・定速状態であれば、PID出力の減速側をCCW出力を行ったとしても
概ね5%程度でDutyが増加した。
■所感
特に細かく制御を切り替えず
PWM駆動周波数は10k~50kHz程度で、SlowDecacy運用。
急停止による駆動系への負荷を気にしなければ
終始加減速を考慮したPID出力で良さそう。